Configuración de parámetros en ASDA-Soft A2 (Delta Electronics)
⚙️ Introducción
Este documento describe el procedimiento para configurar los parámetros del servo drive Delta ASDA-A2 utilizando el software ASDA-Soft.
El objetivo es establecer una comunicación correcta mediante EtherCAT, asegurando la inicialización y parametrización adecuada del servo.
🧰 Requisitos previos
-
Software ASDA-Soft instalado.
-
Cable USB para conexión directa al servo drive.
-
Alimentación de control conectada:
-
Terminales L1C y L2C → 230 V (solo tensión de control).
-
No es necesario alimentar la parte de potencia para la carga de parámetros.
-
🔌 Conexión y acceso a parámetros
-
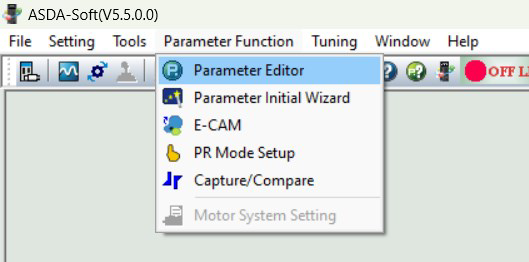
Abrir el programa ASDA-Soft.
-
Seleccionar la opción Parameter Function en la barra superior.
-
Conectar el puerto USB al driver.
-
Ingresar al modo Parametrización Online para acceder en tiempo real al controlador.
🗂️ Carga o creación de parámetros
-
Si se dispone de un archivo de configuración previo (
*.par), se puede cargar directamente. -
En caso contrario, puede utilizarse el siguiente listado de parámetros para una puesta en marcha básica con EtherCAT.
💡 Para modificar un parámetro de forma visual, hacer doble clic en la celda Value dentro de la tabla de parámetros de ASDA-Soft.
🖼️ Figura 1 – Interfaz de edición de parámetros en ASDA-Soft
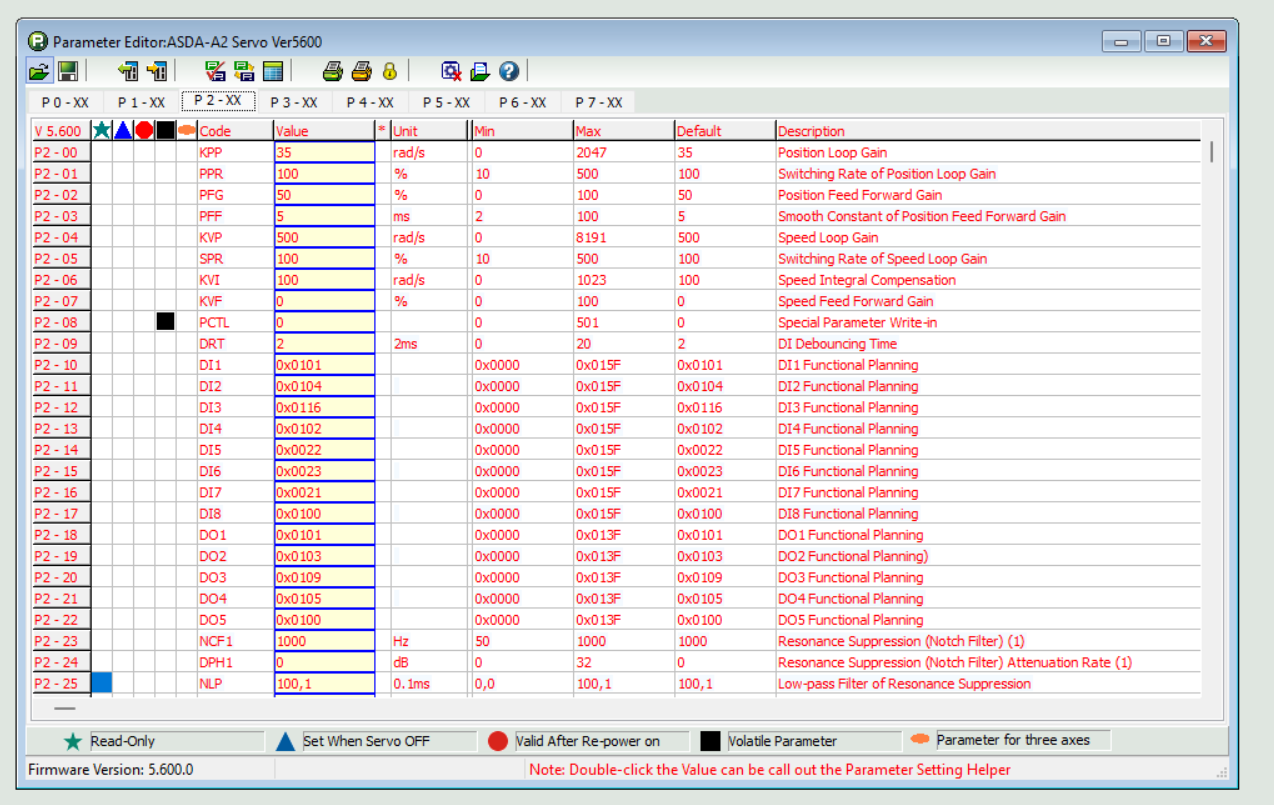
(Captura extraída del documento original. Se observa la edición directa de valores en la columna “Value”).
📋 Listado de parámetros básicos para EtherCAT
| Parámetro | Valor | Descripción |
|---|---|---|
| 2-10 | 0x0100 |
Entrada digital DI1 (Disabled) |
| 2-11 | 0x0100 |
Entrada digital DI2 (Disabled) |
| 2-12 | 0x0100 |
Entrada digital DI3 (Disabled) |
| 2-13 | 0x0100 |
Entrada digital DI4 (Disabled) |
| 2-14 | 0x0000 |
Entrada digital DI5 (Disabled) |
| 2-15 | 0x0000 |
Entrada digital DI6 (Disabled) |
| 2-16 | 0x0000 |
Entrada digital DI7 (Disabled) |
| 2-17 | 0x0100 |
Entrada digital DI8 (Disabled) |
| 3-00 | 0x0001** |
Número de nodo (Node ID) en hexadecimal – configurar según dirección EtherCAT |
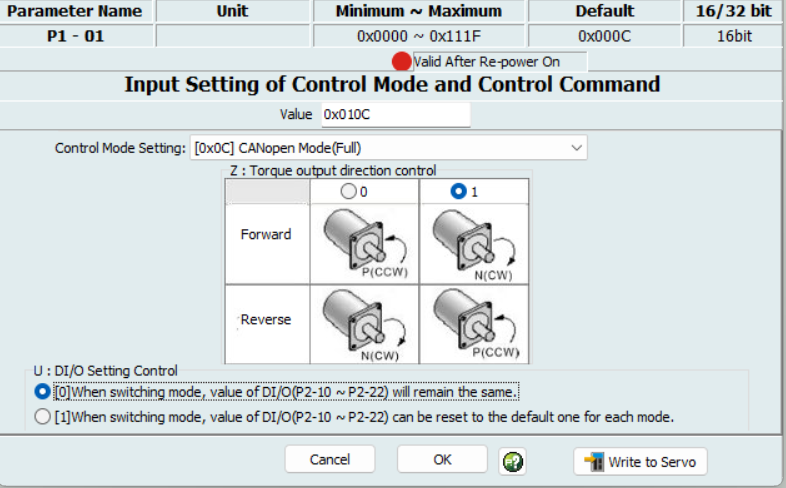
| 1-01 | 0x010C / 0x110C |
Modo CANopen (Full Mode) y sentido de giro: 0x010C CCW / 0x110C CW |
| 3-12 | 0x0100 |
Guardar parámetros en memoria no volátil (EEPROM) |
➡️ Ejemplo de cambio de giro del servo, Polaridad
Parámetro P01-01 para cambiar el sentido de giro del servo, en el configurador visual seleccionar 0 o 1 o por Value 0x010C o 0x110C
💾 Guardar y comprobar la configuración
-
Una vez ajustados los valores, pulsar Write All Parameters para escribirlos en el servo.
-
Verificar el correcto funcionamiento en comunicación EtherCAT.
-
Confirmar que los parámetros permanecen grabados tras apagar y encender el equipo.
📎 Notas finales
-
Este procedimiento aplica a servodrives Delta ASDA-A2 con comunicación EtherCAT.
-
La versión del software ASDA-Soft recomendada es v6.02 o superior.
-
Es importante guardar los parámetros en la memoria no volátil (3-12 = 0x0100) antes de desconectar el equipo.